

大家好:
欢迎收看本期V辣说。我是中科院计算所的谷洋。最近,支付宝推出了AR实景红包功能,把红包的玩法推向了一个新阶段。你可以把红包藏在办公室的键盘上,也可以藏到宠物二哈身上,只有你想不到的地方,没有你藏不到的地方。今天我们就来说说AR实景红包背后的技术原理,希望可以帮助大家抢到更多的实景红包。
首先我们来看,想找到AR实景红包需要满足两个条件:一个是用户需要距离藏红包的地点足够近,目前是500米以内;另一个是需要找到和线索图中一样的物体图片。这两个条件分别对应着时下热门的定位技术和图像识别技术。
我想,对于大家来说,定位技术一定不陌生,因为我们常用的各类打车软件、外卖软件、交友软件等都需要定位技术。定位技术中最核心的原理就是三角定位原理。简单来说,就是利用周边环境中位置已知的无线信号源进行定位。大家知道,无线信号是会随着传播距离发生损耗的,需要定位的设备通过检测接收信号损耗了多少,就能计算出它和无线信号源的直线距离。根据三角几何原理,如果一个点和其它三个已知位置之间的距离确定了,那么这个点的位置也就能确定了。
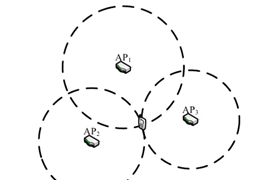
定位技术的种类很多,有基于GPS的、基于基站的、以及WiFi、蓝牙的定位等等。这些技术的根本区别就是用于定位的无线信号源不同,所以它们的定位精度、适用环境也不同。以目前支付宝AR实景红包对位置的范围要求来分析,使用的应该是基于基站的定位方法。
平时我们用手机打电话、发微信主要就是依赖与基站之间的通信。而基站除了提供这些基本的通信服务外,也有辅助定位的作用。根据之前介绍的三角定位原理可知,只要计算三个基站的信号差异,就可以判断出手机所在的位置。基站定位的优势是方便、成本低,相比于GPS定位,不受天气、高楼、位置等影响。但是这种定位方法的定位精度会随所处位置基站数不同会有发生变化,误差大概50-500米左右,在偏远地区或手机信号塔较小的地区,这个误差值可能会更大。

在得到位置信息后,想要找到红包还得满足一个条件:根据线索找对图片。这就涉及到了图片识别技术。AR实景红包中使用的是最简单的图片匹配方法。首先将拍摄的线索图片利用代表性的数据(特征进行)进行数字话、量化的表征,然后将用户寻找红包拍摄新的图片进行量化表示,在使用匹配算法如SIFT方法等进行两个图片的匹配。因此要求用户拍摄的图片和线索图片高度一致。有很多网友把红包图片藏在自家宠物身上,而且是以一个迷之角度。由于再也无法复现这个图片,导致红包无法领取。

俗话说得好,群众的力量是强大的。AR实景红包刚出就被网友们无情的破解了。破解方法其实很简单:首先是保存线索图片,然后用国人最擅长的PS技术弱化线索图片中的阴影线,以尽量恢复出原始图片,以此拿到红包。对于此种行为,支付宝后来也出台了相关政策,防止用户无休止的盗刷红包,在这我们就不多说了。
总结来说,支付宝的AR实景红包还是一个很有创意的小应用,尤其是在过年前后,可以为家人和朋友带来很多有趣的互动,为节日增添喜庆。除了提升节日氛围外,在日常的生活中,商家可以通过AR实景红包吸引顾客到店,增加潜在消费的可能性;公司老板还可以通过实景红包犒赏在单位加班的员工等。总之,AR实景红包的应用场景还是蛮多的。
好了,今天的V辣说就讲到这里。如果您对我们的内容感兴趣,欢迎各位关注“V辣说”,为您解读热点背后的价值。
声明:本网页内容旨在传播知识,若有侵权等问题请及时与本网联系,我们将在第一时间删除处理。E-MAIL:dandanxi6@qq.com