大家好,因为上节课的程序编写中,我们用到了SM0.5,而此前并未详细地介绍SM系列指令。
这节课,我们就来学习一下特殊指令SM系列指令的功能与作用。
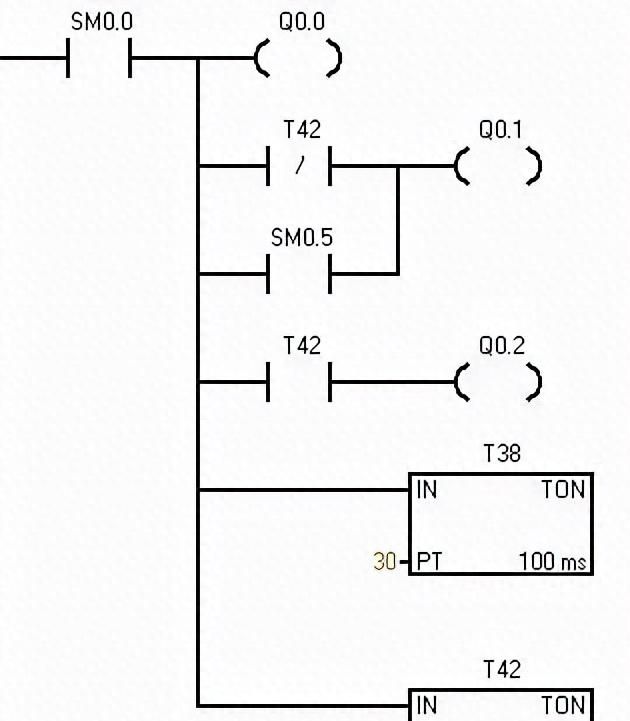

如图所示,SM0.0的作用,是“上电后始终接通”的意思。由于右侧的线圈负载,不能直接接到左侧的能流总线上,所以必须要设定一个导通开关。由于位逻辑指令中的常闭触点,均需指定某个位或负载的地址。为保持上电即导通的目标,这里就常用使用SM0.0指令。
系统状态字中部分常用的标志位说明如下:
SM0.0:始终接通;
SM0.1:首次扫描为1,以后为0,常用来对程序进行初始化;
SM0.2:当机器执行数学运算的结果为负时,该位被置1;
SM0.3:开机后进入RUN方式,该位被置1一个扫描周期;
SM0.4:该位提供一个周期为1分钟的时钟脉冲,30秒为1,30秒为0(常用于执行分钟级闪烁控制);
SM0.5:该位提供一个周期为1秒钟的时钟脉冲,0.5秒为1,0.5秒为0(常用于执行秒级闪烁控制);
SM0.6:该位为扫描时钟脉冲,本次扫描为1,下次扫描为0;
SM1.0:当执行某些指令,其结果为0时,将改位置1;
SM1.1:当执行某些指令,其结果溢出或为非法数值时,将改位置1;
SM1.2:当执行数学运算指令,其结果为负数时,将改位置1;
SM1.3:试图除以0时,将改位置1;
说明一点,SMB0包括8个状态位(SM0.0/SM0.1/SM0.2/SM0.3/SM0.4/SM0.5/SM0.6/SM0.7)。
声明:本网页内容旨在传播知识,若有侵权等问题请及时与本网联系,我们将在第一时间删除处理。E-MAIL:dandanxi6@qq.com